하나 해결하면 하나 막히고 해결하면 또 막히고 또 막히고 시발
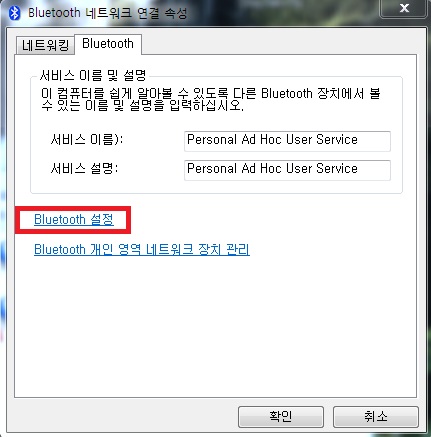
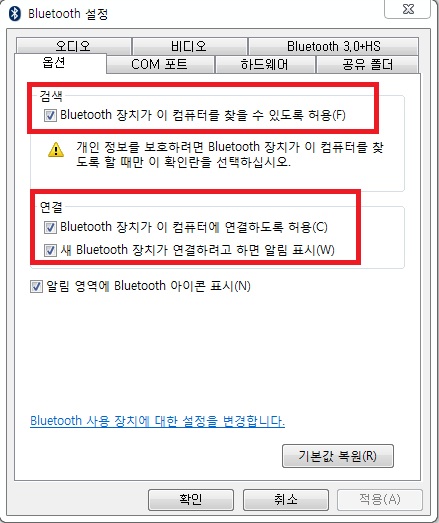
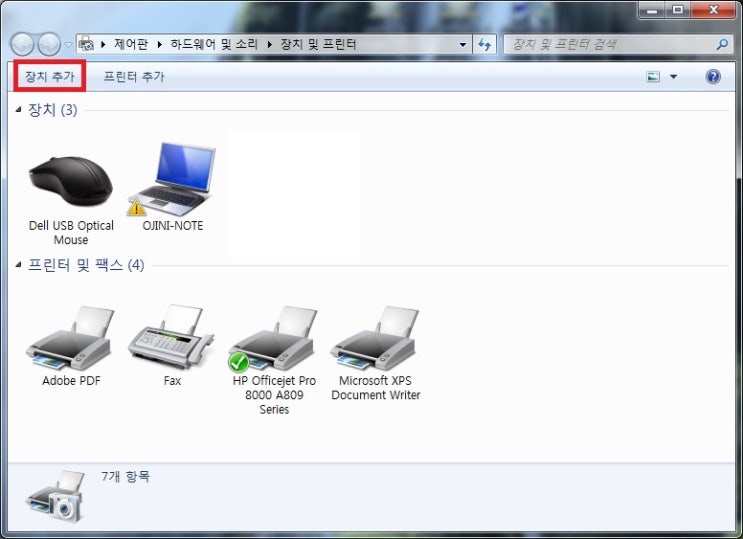
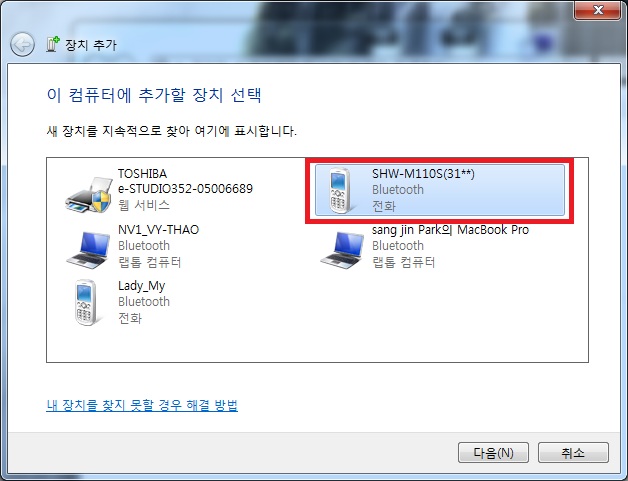
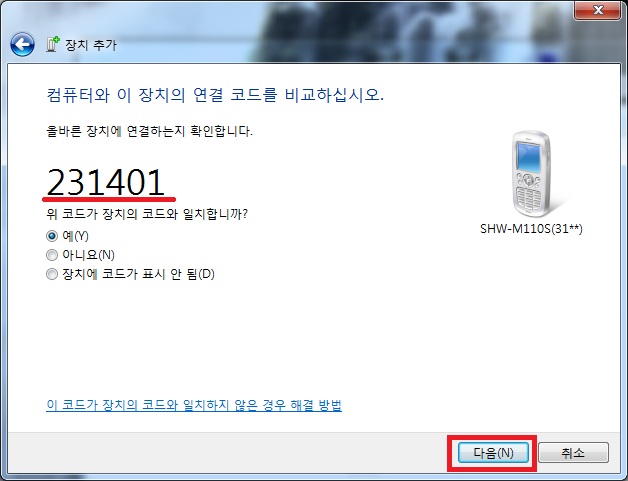
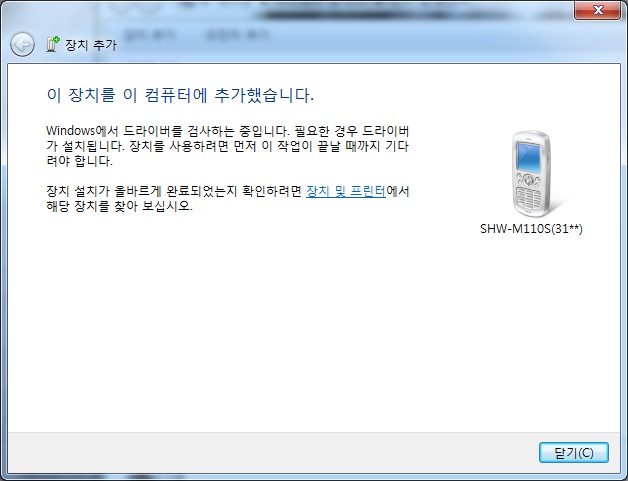
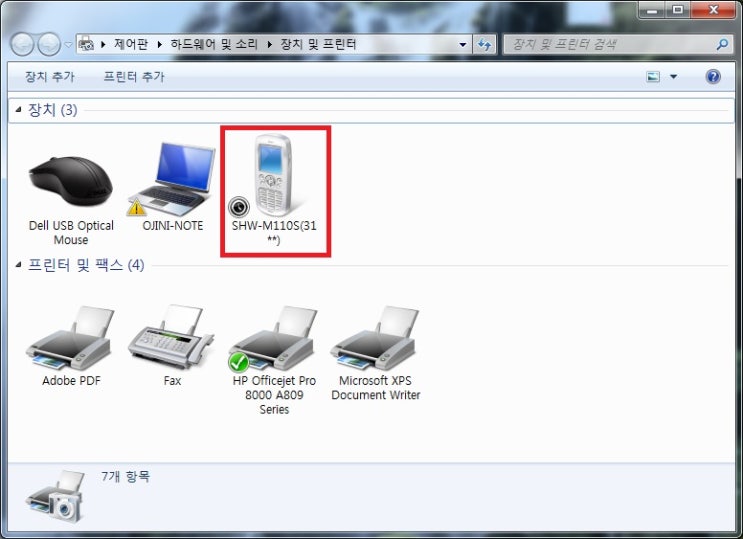
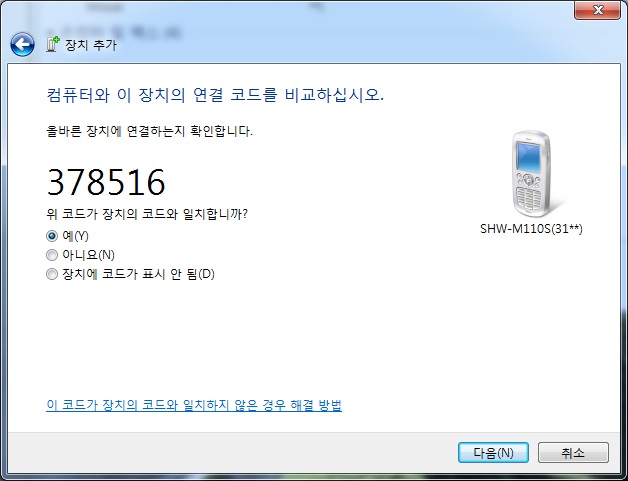
0. 드디어 메가에서 블루투스를 사용할 수 있게 되었다.
메가는 우노와 달리 RX를 사용할 수 있는 특정 핀번호가 지정되어있다
시바 이걸 진작에 알았다면 이미 다 완성했을텐데 시발..
1. 정면으로 센서 두개 붙이니까 병신같이 동작하는 이유를 깨달았다
초음파센서는 자기가 초음파를 쏜 다음에 다시 돌아올때까지 시간을 계산하는데
두개를 같은 방향으로 달아놓으니 내가 쏜것도 인식하고 쟤가 쏜것도 인식해서
정확한 거리를 측정할 수가 없다.
2. 초음파센서로 거리를 측정하는 도중 중간에 값이 자꾸 튄다
보드에서 작은소리가 나는데 중간에 끊기는 소리가 난다. 이때 값이 튀는것 같은데
정확하게 왜 그러는지 알 수 가 없다
중간중간 들어간 delay때문에 그런가 했는데 그것도 아닌것 같다 delay를 다 빼도 계속 튄다
센서가 싸구려라 그런가
3. 시발
dc모터로는 직선으로 진행하기도 힘들고
무엇보다 90도 회전이 너무 어렵다 너무 치명적이다
알고리즘으로 해결하기에는 너무 문제가 많다
아무래도 스테핑모터를 쓸 수 밖에 없나 너무 비싼데
3-1. 문제가 더 있다
스테핑모터를 제어한다고 해도
두개의 스테핑모터를 동시에 제어할 수가 없다.
두개의 mcu를 쓰는거는 의미가 없고
인터럽트나 쓰레드를 사용한다고 해도 조금의 차이가 생긴단다
3-2. better alternative
뒷바퀴는 dc모터 1개를 이용하여 바퀴 2개를 직접 연결한다 직진성은 보장된다
그리고 앞에다가 서보모터를 이용하여 조향을 한다.
서보모터로 정확한 각도 조정이 가능하므로 90도 회전을 할 수 있다
지금으로서는 이게 최선인것 같다
'아두이노' 카테고리의 다른 글
| 노트북 블루투스 연결 (0) | 2014.01.22 |
|---|---|
| TV 리모컨 (0) | 2013.09.28 |
| 에어컨 리모컨 (0) | 2013.09.06 |
| rc카 (0) | 2013.09.03 |
| LED가지고 슈퍼마리오 (0) | 2013.08.29 |